1. ABB机器人提供自定义的错误处理。
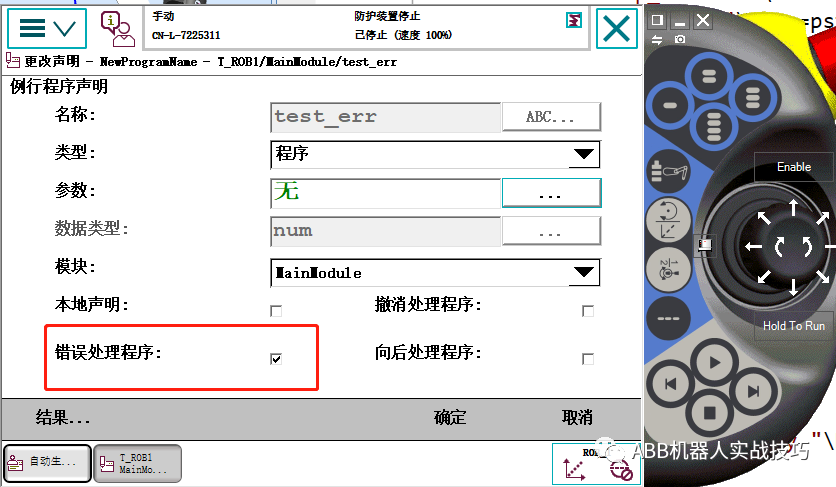
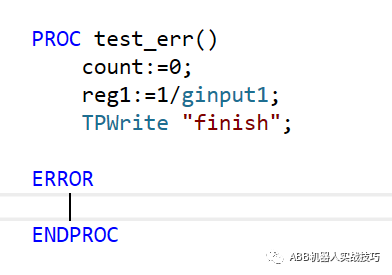
2. 在创建例行程序时,勾选“错误处理程序”,也可直接在RAPID中的proc末端加入关键字ERROR
3. 在错误处理中,可以使用以下关键字
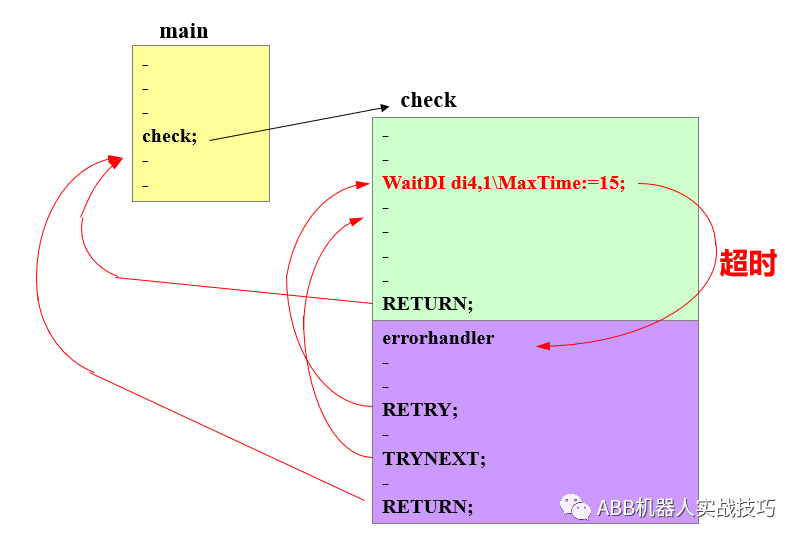
• RETRY : 程序指针回到触发错误的地方再试一次
• RETURN:程序指针跳出该routine并回到上一级引用该routine的下一行继续
• TRYNEXT :程序指针回到触发错误的程序的下一行继续
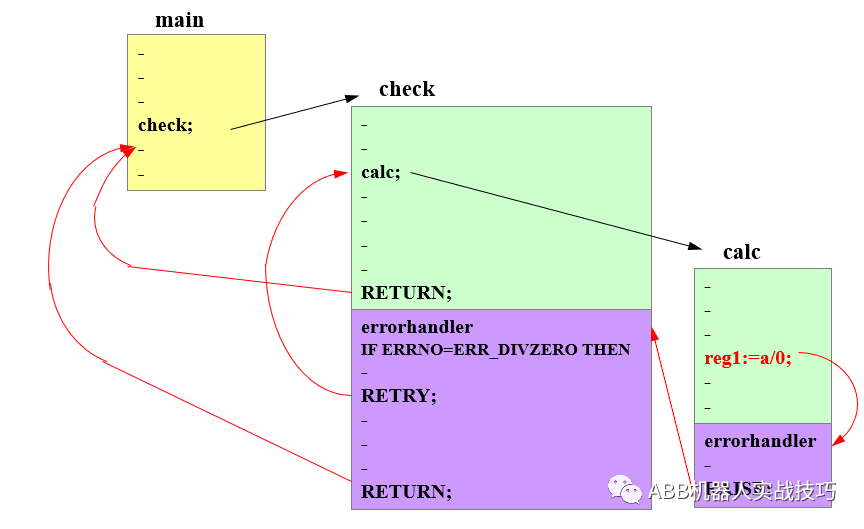
• RAISE:关键字出现在ERROR HANDLER中,且后无其他变量和数据,进入引用该routine的上一级routine的错误处理区域寻求处理
• EXITCYCLE: 程序指针回到Main程序***行
RAISE也可用在正常程序中,后添加errnum,即Raise errnum1,表示触发自定义错误errnum1

在使用错误处理时,程序指针***终不能停留在错误区,必须跳出,否则系统错误。
4. 以下例子表示读取组输入信号并计算,若输入信号为0,则等待1s后重试,重试3次后输入信号依旧为0,则程序继续往下执行。
PROCtest_err() count:=0; reg1:=1/ginput1; TPWrite "finish"; ERROR IF ERRNO=ERR_DIVZERO THEN IF count<3 THEN count:=count+1; waittime 1; TPWrite "retry "Num:=count; RETRY; ELSE TPWrite "retry more than 3"; TRYNEXT; ENDIF ENDIF ENDPROC
********************************
如何获取更多经典文章?
关注公众号 ABB机器人实战技巧,点击页面底部的往期经典和配置,查看更多经典内容
点击阅读原文,学习robotstudio仿真,获取完整教学视频
更多内容
★ 如何搜索历史文章
★基于pcsdk传输文件到HOME及加载
★RMQ通讯-与PC通讯
★使用定时中断向PLC发送机器人位置
★信号的准确提早触发
★变位机校准
★ABB机器人零位校准的那些秘密
★创建UDP通讯
★旋转姿态的左乘与右乘
★通过socket控制机器人启停
★机器人画哆啦A梦
★六一节,机器人画柯南
★searchL仿真工作站
★pathoffset轨迹实时修正功能
★撤销处理程序
★使用组输出发送ASCII码
机器人PROFINET同时做CONTROLLER和DEVICE
★语音控制ABB机器人
★手机访问web控制机器人
★YUMI 伺服手仿真制作
★自定义伺服焊枪
★制作输送链抓取搬运码垛工作站
★随机物料产生与抓取
★四轴机器人定义TCP
★更换工具后重算tcp
★自定义外部轴-变位机
★示教四点完成码垛
★multimove之双机器人与变位机
Robotware6.08碰撞预测启用与关闭
SMB板针脚解释
四六关节耦合限制
求两点间距离
新I/O DSQC1030配置
ABB机器人配置伺服焊枪
机器人碰撞后如何移动
转角路径故障不提示设置
外部PLC选择机器人程序
一键回HOME程序
机器人各轴上下限位修改
Wobjdata数据解释
输送链跟踪与视觉的联系
急停与自动停止接线
更多详情:ABB机器人


 联系我们
联系我们
