

 联系我们
联系我们

如何设置ABB喷涂雾化器的TCP?
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
工博士可以集成FANUC,Yaskawa,ABB,KUKA和Kawasaki等制造商的机器人。凭借多年的集成机器人的经验,我们公司是帮助您做出*明智,*经济高效的解决方案的明智选择的绝佳选择。
TCP 对于机器人来说是十分重要的,它的准确性决定了机器人轨迹的准确与任务的完成率。那么如何正确快速的定义一个安装有ABB雾化器的机器人工作TCP 呢?我们可以通过ABB 雾化器标准技术文档的阅读来找到答案。
首先,在您的随机光盘里找到用户文档的主界面。

其次在雾化器章节中找到您使用的ABB 雾化器的具体型号的服务文档(如RB1000-SSD/SAD)的规格描述部分,可以根据实际不同的喷涂距离确定所要设定的TCP 的坐标。
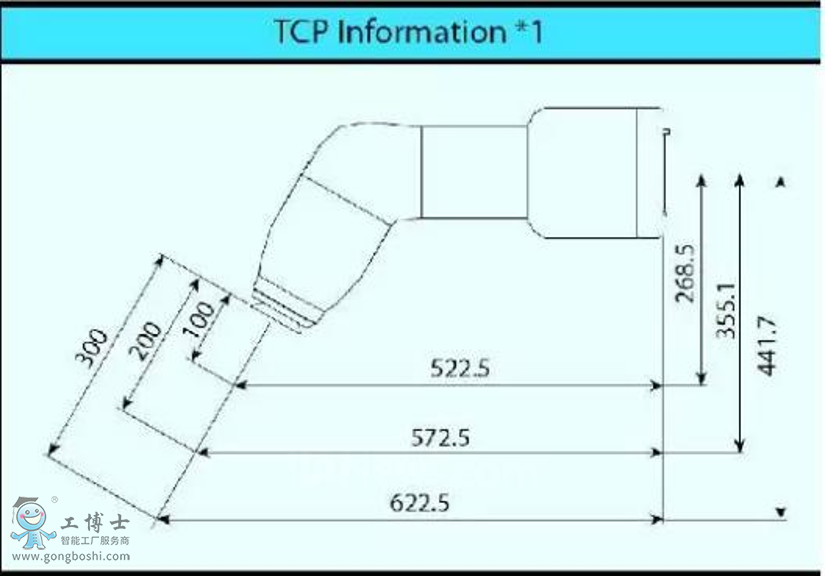
然后找到规格描述中关于中心和TCP 姿态的相关信息(如RB1000-SSD/SAD)。

*后在工具数据里将所收集的信息输入相应项目中。

在此处联系我们或致电与我们联系,以获取有关ABB机器人配件和解决方案的快速简便的报价。
了解更多ABB机器人保养,ABB机器人维修,请咨询:ABB机器人配件
- 下一篇:ABB机器人常见问题回答汇总
- 上一篇:ABB工业机器人常规保养维护方法