联系我们
联系我们

ABB机器人批量修改点位名称和轨迹顺序
注:本文章文字、图片部分来自网络
版权归原作者,侵删。
您是否对将工业自动化集成到您的设施中感兴趣?如果是这样,那么您应该致电工业自动化和集成领域的领导者工博士。工博士是包括DENSO,FANUC,Yaskawa,KUKA,Kawasaki和ABB在内的多家不同机器人公司的认证集成商。我们的员工致力于帮助您为您的行业和预算构建和定制完美的自动化系统。
1. 现场ABB机器人程序,示教时没有给点位取名,直接使用星号,如下

2. 现在希望轨迹能够调整顺序,即轨迹从后往前走,如何快速实现?
3. 可以借助ABB机器人robotstudio来实现
4. 在robotstudio创建系统并恢复现场轨迹
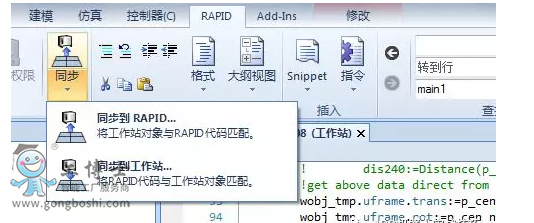
5. 点击上图中的同步到工作站,
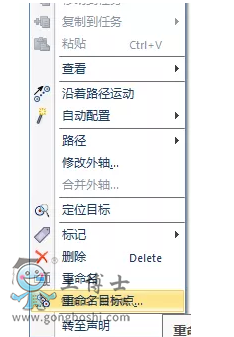
6. 在基本视图下,找到对应的例行程序,右击
7. 选择反转路径
8. 再选择同步到rapid,即可

9. 在步骤7时,也可以右击选择重名目标点,批量把未命名的点位命名